
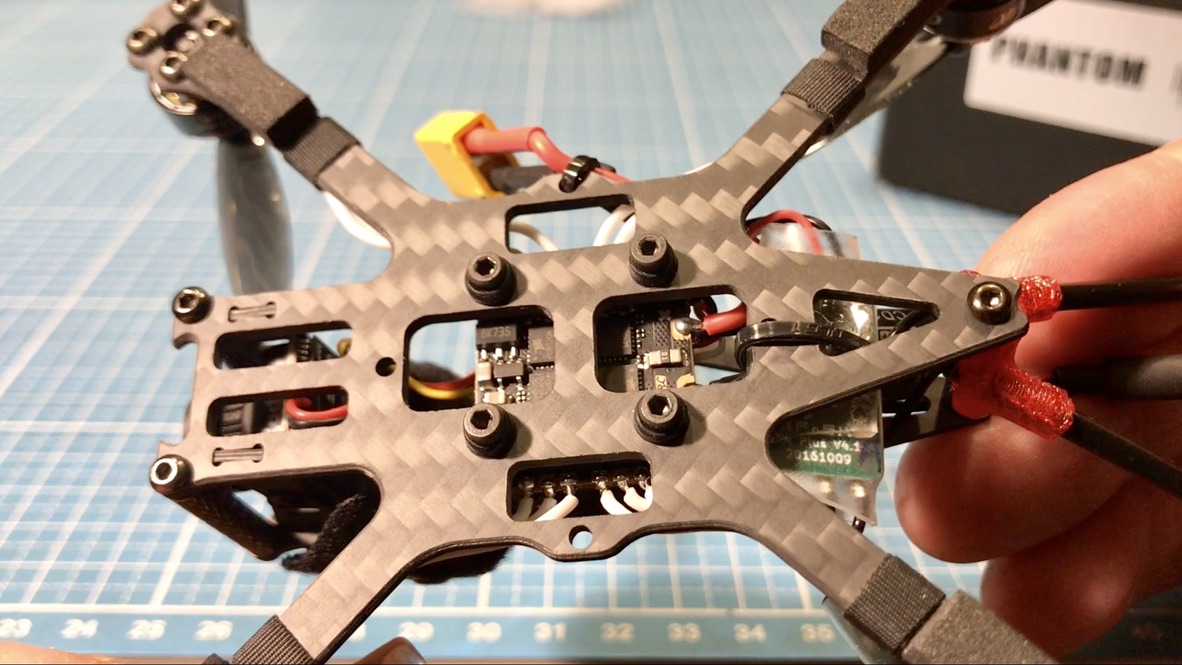
Dies ist der kleinste Freestyle FPV Racer. So groß wie meine Handfläche.
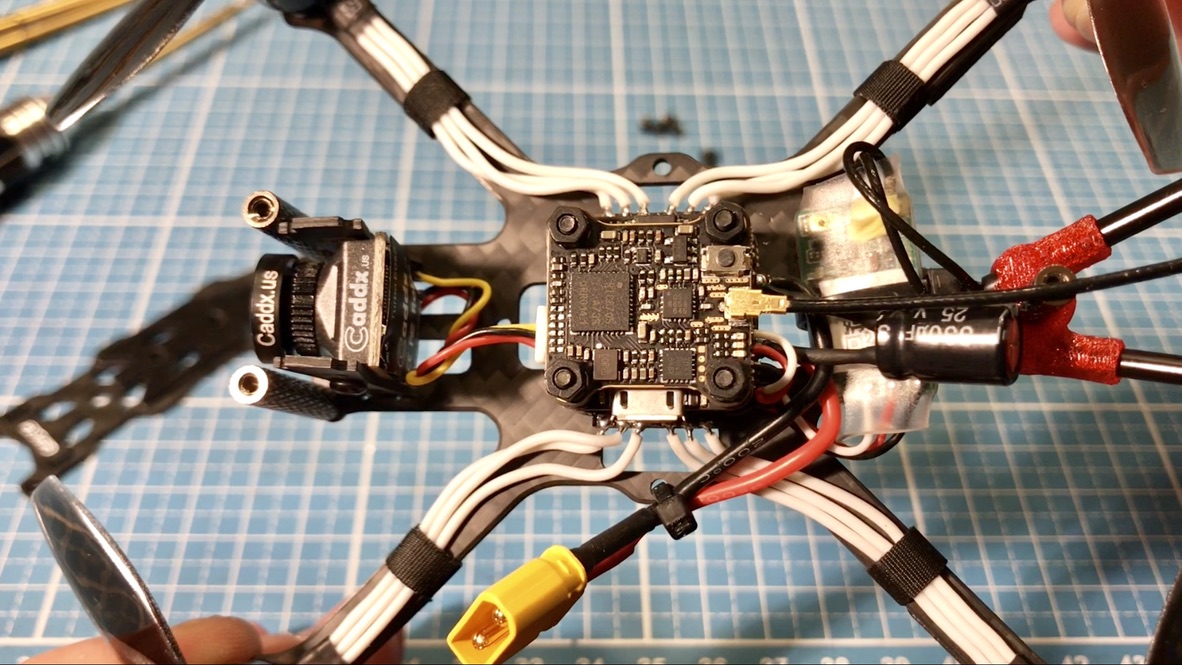
Der Vorteil des Phantoms ist, dass es nur gute Komponenten hat. Eine gute EOS2 Kamera, einen guten 25-200mW Videosender und du kannst jeden Empfänger einbauen mit dem du eine gute Reichweite hast.
Pro:
- VTX 25-200mW
- EOS2-Kamera
- 16x16mm Stack des F4 12A Reglers
- unterstützt alle Empfänger
Kontra:
- schwerer als Salifly-X
- weniger Flugzeit als Salifly-X
Mein Review-Video
GEPRC Phantom Freestyle FPV Racer 3S
Suitable batteries:
GNB 300mAh 3S 30C
Banggood – http://bit.ly/Gnb300mAh3S
Amazon – https://amzn.to/2xg3kOx
Happymodel 300mAh 3S 30C
Banggood – http://bit.ly/M7Hd300mAh
Amazon – https://amzn.to/2IQ4zdY
BETAFPV 300mAh 3S
GNB 300mAh 3S 45C – http://bit.ly/Gnb3s80c
GNB 450MAH 2S 80C – http://bit.ly/GNB2S450mah
Hier im Video zeige ich wie ich einen anderen Video Sender auf dem GEPRC Phantom Quad anschliesse. Hierzu verwende ich den neuen OVX303 OpenVTX Video Sender von Happymodel.
HappyModel OVX303 OVX300 OpenVTX
AE – https://s.click.aliexpress.com/e/_9RqYas
BG – https://www.banggood.com/custlink/Dv3yeqA3iy
GepRC Phantom Toothpick
BG – https://www.banggood.com/custlink/mDvm0vNdcW
BG Coupon: PARTS8
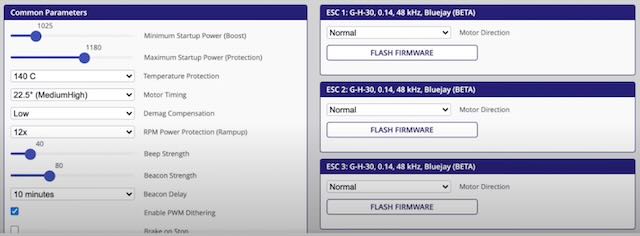
Meine DIFF von Betaflight 4.2.10 mit dem Happymodel OVX303 Video Sender und aktiven RPM Filter. Hierzu habe ich BlueJay 0.14 48k Firmware auf die ESC’s aufgespielt – https://github.com/mathiasvr/bluejay-configurator/releases
# Einstellungen 2021-10-28 mit neuem VTX OVX303 von happymodel
# RPM 20211025 BlueJay 0.14 48k
# Betaflight / STM32F411 (S411) 4.2.10 Sep 30 2021
# config: manufacturer_id: MTKS, board_name: MATEKF411
batch start
defaults nosave
resource MOTOR 5 A00
resource LED_STRIP 1 A00
resource SERIAL_TX 11 A08
resource SERIAL_RX 11 B10
resource FLASH_CS 1 B03
dma ADC 1 0
feature -AIRMODE
beeper -GYRO_CALIBRATED
beeper -RX_LOST
beeper -RX_LOST_LANDING
beeper -DISARMING
beeper -ARMING
beeper -ARMING_GPS_FIX
beeper -BAT_CRIT_LOW
beeper -BAT_LOW
beeper -GPS_STATUS
beeper -ACC_CALIBRATION
beeper -ACC_CALIBRATION_FAIL
beeper -READY_BEEP
beeper -DISARM_REPEAT
beeper -ARMED
beeper -SYSTEM_INIT
beeper -ON_USB
beeper -BLACKBOX_ERASE
beeper -CRASH_FLIP
beeper -CAM_CONNECTION_OPEN
beeper -CAM_CONNECTION_CLOSE
beeper -RC_SMOOTHING_INIT_FAIL
beacon RX_SET
map TAER1234
serial 0 0 115200 57600 0 115200
serial 1 64 115200 57600 0 115200
serial 30 8192 115200 57600 0 115200
aux 0 0 0 1725 2100 0 0
aux 1 1 1 900 1300 0 0
aux 2 2 1 1300 1700 0 0
aux 3 13 2 1700 2100 0 0
aux 4 28 1 1700 2100 0 0
aux 5 35 2 1300 1700 0 0
vtxtable bands 5
vtxtable channels 8
vtxtable band 1 BOSCAM_A A CUSTOM 5865 5845 5825 5805 5785 5765 5745 5725
vtxtable band 2 BOSCAM_B B CUSTOM 5733 5752 5771 5790 5809 5828 5847 5866
vtxtable band 3 BOSCAM_E E CUSTOM 5705 5685 5665 5645 5885 5905 5925 5945
vtxtable band 4 FATSHARK F CUSTOM 5740 5760 5780 5800 5820 5840 5860 5880
vtxtable band 5 RACEBAND R CUSTOM 5658 5695 5732 5769 5806 5843 5880 5917
vtxtable powerlevels 5
vtxtable powervalues 1 2 25 100 400
vtxtable powerlabels 0 RCE 25 100 400
# master
set gyro_lowpass2_hz = 325
set dyn_notch_width_percent = 0
set dyn_notch_q = 250
set dyn_notch_max_hz = 350
set dyn_lpf_gyro_min_hz = 260
set dyn_lpf_gyro_max_hz = 650
set acc_calibration = -86,-42,163,1
set serialrx_provider = CRSF
set blackbox_device = SPIFLASH
set dshot_bidir = ON
set motor_pwm_protocol = DSHOT300
set motor_poles = 12
set align_board_yaw = 270
set vbat_max_cell_voltage = 435
set ibata_scale = 100
set small_angle = 180
set thrust_linear = 25
set osd_rssi_pos = 2273
set osd_link_quality_pos = 2305
set osd_tim_2_pos = 2423
set osd_flymode_pos = 2401
set osd_vtx_channel_pos = 2389
set osd_craft_name_pos = 2411
set osd_avg_cell_voltage_pos = 2369
set vtx_band = 5
set vtx_channel = 6
set vtx_power = 3
set vtx_freq = 5843
set vcd_video_system = NTSC
set dashboard_i2c_bus = 1
set flash_spi_bus = 2
set gyro_1_sensor_align = CW0
set gyro_rpm_notch_harmonics = 1
set name = SMART25
profile 0
set dyn_lpf_dterm_min_hz = 91
set dyn_lpf_dterm_max_hz = 221
set dterm_lowpass2_hz = 195
set anti_gravity_gain = 5000
set iterm_relax_type = GYRO
set throttle_boost = 0
set p_pitch = 54
set p_roll = 50
set d_roll = 34
set p_yaw = 40
set d_min_roll = 22
set d_min_pitch = 37
rateprofile 0
set roll_expo = 30
set pitch_expo = 30
set yaw_expo = 20
set roll_srate = 76
set pitch_srate = 76
set yaw_srate = 74
save
# 






Einstellung mit Betaflight 4.1.1 mit original Video Sender ohne RPM Filter
# Einstellungen 20210824
# Betaflight / STM32F411 (S411) 4.1.1 Nov 15 2019 / 12:55:17 (1e5e3d369) MSP API: 1.42
# board_name: MATEKF411 custom defaults: YES
# start the command batch
batch start
# reset configuration to default settings
defaults nosave
# resources
resource I2C_SCL 1 B08
resource I2C_SDA 1 B09
# dma
dma ADC 1 0
# ADC 1: DMA2 Stream 0 Channel 0
# beacon
beacon RX_LOST
beacon RX_SET
# map
map TAER1234
# serial
serial 0 8192 115200 57600 0 115200
serial 1 64 115200 57600 0 115200
# aux
aux 0 0 0 1725 2100 0 0
aux 1 1 1 1250 1650 0 0
aux 2 2 1 1700 2100 0 0
aux 3 13 2 1550 2100 0 0
aux 4 35 3 1700 2100 0 0
# vtxtable
vtxtable bands 5
vtxtable channels 8
vtxtable band 1 BOSCAM_A A CUSTOM 5865 5845 5825 5805 5785 5765 5745 5725
vtxtable band 2 BOSCAM_B B CUSTOM 5733 5752 5771 5790 5809 5828 5847 5866
vtxtable band 3 BOSCAM_E E CUSTOM 5705 5685 5665 5665 5885 5905 5905 5905
vtxtable band 4 FATSHARK F CUSTOM 5740 5760 5780 5800 5820 5840 5860 5880
vtxtable band 5 RACEBAND R CUSTOM 5658 5695 5732 5769 5806 5843 5880 5917
vtxtable powerlevels 5
vtxtable powervalues 25 100 200 400 600
vtxtable powerlabels 25 100 200 400 600
set gyro_sync_denom = 2
set gyro_lowpass2_hz = 350
set dyn_lpf_gyro_min_hz = 280
set dyn_lpf_gyro_max_hz = 700
set acc_calibration = 39,143,-205
set mag_bustype = SPI
set mag_i2c_device = 0
set serialrx_provider = CRSF
set dshot_idle_value = 600
set motor_pwm_protocol = DSHOT300
set align_board_yaw = 90
set ibata_scale = 210
set beeper_dshot_beacon_tone = 3
set small_angle = 180
set pid_process_denom = 1
set osd_vbat_pos = 354
set osd_rssi_pos = 2241
set osd_tim_2_pos = 2423
set osd_flymode_pos = 2106
set osd_vtx_channel_pos = 2404
set osd_mah_drawn_pos = 2114
set osd_craft_name_pos = 364
set osd_warnings_pos = 329
set osd_avg_cell_voltage_pos = 2082
set vtx_band = 5
set vtx_channel = 7
set vtx_power = 3
set vtx_freq = 5880
set vcd_video_system = NTSC
set dashboard_i2c_bus = 1
set gyro_1_sensor_align = CW180
set gyro_1_align_yaw = 1800
set name = PHANTOM
profile 0
set dyn_lpf_dterm_min_hz = 98
set dyn_lpf_dterm_max_hz = 238
set dterm_lowpass2_hz = 210
set feedforward_transition = 60
set p_pitch = 41
set i_pitch = 70
set d_pitch = 28
set f_pitch = 93
set p_roll = 38
set i_roll = 65
set d_roll = 26
set f_roll = 88
set p_yaw = 63
set i_yaw = 65
set f_yaw = 88
set d_min_pitch = 21
save
# Mein Social Medien:
Youtube – https://www.youtube.com/kopterheld
Facebook – https://www.facebook.com/kopterheld/
Blog – https://kopterheld.tv/
RCGroups – https://goo.gl/JYP87D
Telegram – https://t.me/s/KopterHeld
Instagram – https://instagram.com/kopterheld
