
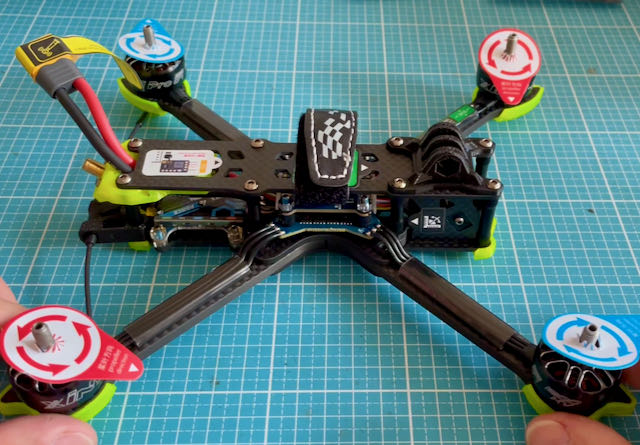
iFlight Nazgul5 V2 mit XING-E 2207 1800KV 6S Motoren mit SucceX-E FF, 45A ESC’s und verbessertes Frame, RaceCam R1 Kamera mit 25-800mW VTX
Der Nazgul ist hier die analoge Version mit der sehr guten iFlight RaceCam R1, naja, eigentlich ist das die Caddx Ratel V2 Kamera, die ein super Bild liefert. Die Ratel V2 ist meine Favorit analog Kamera, wegen den natürlichen Farben und das Bild ist nicht zu scharfen, so dass alles sehr angenehm für das Auge ist. Den Nazgul5 V2 habe ich bereits getestet, aber mit einem F4 FC. Der hier hat bereits den F7 FC der genug Serielle Anschlüsse hat und schneller als ein F4 FC arbeitet was immer gut ist, wenn man die RPM Filterung unter Betaflight nutzen möchte. Die Motoren sind die neuen XING-E Pro 2207 mit 1800KV für 6S Akkus. Das besondere an den Motoren ist dass diese bereits die Glocke aus einem Aluminium Teil gemacht haben, wo bei dem alten Nazgul5 noch die XING-E Motoren waren die Glocke aus zwei Stücken bestand. Bei der analogen Version ist weiterhin der guter iFlight SucceX Video Sender eingebaut mit 25 bis 800mW. Der Video Sender liefert ein sehr sauberes Bild vor allem wenn man hier einen guten Empfänger wie Rapidfire oder TBS Fusion verwendet.
Flight Nazgul5 V2 6S analog
BG Coupon: BGC429D5 o. DRONES6 – https://www.banggood.com/custlink/DGKyJaPMya
Flight Nazgul5 V2 4S analog
BG Coupon: BGC429D5 o. DRONES6 – https://www.banggood.com/custlink/G3KEJjHzYB
iFlight Nazgul5 V2 6S HD DJI LED Version
BG Code: DRONES6 – https://www.banggood.com/custlink/3G3ylamqGq
iFlight Nazgul5 Evoque + DJI FPV Goggles V2 Combo
BG Code: DRONES6 – https://www.banggood.com/custlink/33GyB80N6j
iFlight Nazgul5 Evoque F5 F5X Squadshed X Caddx Polar Vista 6S
BG Code: DRONES6 – https://www.banggood.com/custlink/K3Gy6RZU9f
iFlight Nazgul5 Evoque F5 F5X Squadshed X Analog 6S
BG Code: BGEFAADC oder DRONES6 – https://www.banggood.com/custlink/mDvYeR9q84












Hier der Schaltplan von iFlight SucceX-E-F4 FC und ESC


DIY Adapter von 20x20mm auf 25,5×25,5mm bestehend aus einem 5mm Kabelbinder der in zwei Stücke je 44mm aufgeteilt wurde. Für die Montage werden 4x M2 7mm, 4x M2 12mm Schrauben, 8x M2 Muttern und 4x M2 Muttern mit Gewindesicherung benötigt.

Montage von 20x20mm auf 25,5×25,5mm Adapter auf dem Nazgul5 V2


Walksnail Modul auf dem Nazgul5 V2


Fertiger Nazgul5 V2 mit Walksnail HD System mit der Micro Kamera
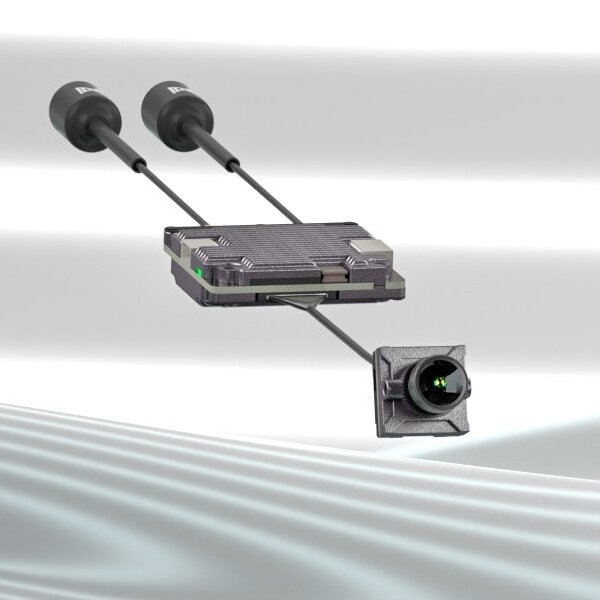
Walksnail Avatar HD Nano Digital FPV Camera VTX Kit
Caddx Shop – https://bit.ly/walksnail3
Das digitale Modul für die Fatshark HD digital Brille oder WALKSNAIL Avatar HD Brille. 1080P 22ms Low Latency Übertragung mit Rückkanal wie bei DJI digital. 1200mW Leistung.

Walksnail Avatar VRX(Pre-sale)
Caddx Shop – https://bit.ly/awatarx
Walksnail VRX Empfänger Modul für deine analoge FPV Brille welches über HDMI Anschluss verbunden wird.
Mit dabei ein Avatar 1S Kit 350mW oder das grosse Avatar HD Micro Kit.

Man kann sich so ein 20×20 auf 25.5×25.5 Adapter auch ausdrucken – https://www.thingiverse.com/thing:4964039
Kopterheld Coupons:
https://t.me/s/KopterHeld
https://kopterheld.tv/
https://www.facebook.com/kopterheld/
Mein Equipment:
DJI FPV Goggles V2 – https://www.banggood.com/custlink/DDmRIkhAdY
Fatshark Dominator HDO2 – https://www.banggood.com/custlink/KmGKeeY4pN
ImmersionRC RapidFIRE – https://www.banggood.com/custlink/vm3v6vafP1
Radiomaster TX16S – https://www.banggood.com/custlink/vGvKMV73QP
CADDX Ratel 2 – https://www.banggood.com/custlink/GDvEFB6wnC
Youtube – https://www.youtube.com/kopterheld
Facebook – https://www.facebook.com/kopterheld/
Blog – https://kopterheld.tv/
RCGroups – https://goo.gl/JYP87D
Telegram – https://t.me/s/KopterHeld
Instagram – https://instagram.com/kopterheld
Twitter – https://twitter.com/kopterheld
Mein Einstellungen Nazgul5 V2 (DIFF ALL) iFlight Blitz F7 vom 14.8.2022
# meine Einstellungen 20220814
# Betaflight / IFLIGHT_BLITZ_F722 (IFLIGHT_BLITZ_F722) 4.2.11 Mar 19 2022
# start the command batch
batch start
# reset configuration to default settings
defaults nosave
board_name IFLIGHT_BLITZ_F722
manufacturer_id IFRC
mcu_id 000a00115931500f20393539
signature
# name: Nazgul5 V2
# resources
resource PPM 1 A03
# timer
timer A03 AF2
# pin A03: TIM5 CH4 (AF2)
# dma
dma pin A03 1
# pin A03: DMA1 Stream 3 Channel 6
# feature
feature LED_STRIP
# beacon
beacon RX_SET
# serial
serial 0 1 115200 57600 0 115200
serial 1 64 115200 57600 0 115200
serial 4 0 115200 57600 0 115200
# led
led 0 0,0::L:0
led 1 1,0::L:0
led 2 2,0::L:0
led 3 3,0::L:0
# aux
aux 0 0 0 1700 2100 0 0
aux 1 1 1 900 1250 0 0
aux 2 2 1 1300 1700 0 0
aux 3 13 2 1700 2100 0 0
# vtxtable
vtxtable bands 5
vtxtable channels 8
vtxtable band 1 BOSCAM_A A CUSTOM 5865 5845 5825 5805 5785 5765 5745 5725
vtxtable band 2 BOSCAM_B B CUSTOM 5733 5752 5771 5790 5809 5828 5847 5866
vtxtable band 3 BOSCAM_E E CUSTOM 5705 5685 5665 0 5885 5905 0 0
vtxtable band 4 FATSHARK F CUSTOM 5740 5760 5780 5800 5820 5840 5860 5880
vtxtable band 5 RACEBAND R CUSTOM 5658 5695 5732 5769 5806 5843 5880 5917
vtxtable powerlevels 4
vtxtable powervalues 25 100 400 800
vtxtable powerlabels 25 100 400 800
# master
set dyn_notch_width_percent = 10
set dyn_notch_max_hz = 500
set acc_calibration = -31,16,5,1
set mag_hardware = NONE
set baro_hardware = NONE
set serialrx_provider = CRSF
set blackbox_p_ratio = 16
set vbat_max_cell_voltage = 422
set yaw_motors_reversed = ON
set small_angle = 180
set osd_warn_core_temp = OFF
set osd_rssi_pos = 2520
set osd_link_quality_pos = 2488
set osd_rssi_dbm_pos = 2456
set osd_tim_2_pos = 2550
set osd_flymode_pos = 2507
set osd_vtx_channel_pos = 373
set osd_current_pos = 2496
set osd_mah_drawn_pos = 2528
set osd_craft_name_pos = 2537
set osd_gps_speed_pos = 342
set osd_gps_sats_pos = 310
set osd_home_dir_pos = 302
set osd_home_dist_pos = 430
set osd_altitude_pos = 341
set osd_warnings_pos = 14760
set osd_avg_cell_voltage_pos = 2464
set osd_disarmed_pos = 2432
set osd_displayport_device = MSP
set debug_mode = GYRO_SCALED
set vtx_band = 5
set vtx_channel = 6
set vtx_power = 1
set vtx_freq = 5843
set displayport_msp_serial = 0
set gyro_1_sensor_align = CW0
set gyro_1_align_yaw = 0
set name = Nazgul5 V2
profile 0
set dyn_lpf_dterm_min_hz = 91
set dyn_lpf_dterm_max_hz = 221
set dterm_lowpass2_hz = 195
set yaw_lowpass_hz = 70
set p_pitch = 55
set d_pitch = 41
set f_pitch = 124
set p_roll = 50
set d_roll = 38
set f_roll = 117
set p_yaw = 54
set f_yaw = 117
profile 0
rateprofile 0
# rateprofile 0
set rates_type = ACTUAL
set roll_rc_rate = 19
set pitch_rc_rate = 19
set yaw_rc_rate = 19
set roll_expo = 60
set pitch_expo = 60
set yaw_expo = 60
set roll_srate = 90
set pitch_srate = 90
set yaw_srate = 90
rateprofile 0
saveOriginal Einstellungen vom 1.8.2022 Nazgul5 V2
# original Einstellungen 20220801
# Betaflight / IFLIGHT_BLITZ_F722 (IFLIGHT_BLITZ_F722) 4.2.11 Mar 19 2022
# start the command batch
batch start
# reset configuration to default settings
defaults nosave
board_name IFLIGHT_BLITZ_F722
manufacturer_id IFRC
mcu_id 000a00115931500f20393539
signature
# name: Nazgul5 V2
# resources
resource PPM 1 A03
# timer
timer A03 AF2
# pin A03: TIM5 CH4 (AF2)
# dma
dma pin A03 1
# pin A03: DMA1 Stream 3 Channel 6
# feature
feature LED_STRIP
# serial
serial 0 8192 115200 57600 0 115200
serial 1 64 115200 57600 0 115200
serial 4 0 115200 57600 0 115200
# led
led 0 0,0::L:0
led 1 1,0::L:0
led 2 2,0::L:0
led 3 3,0::L:0
# aux
aux 0 0 0 1700 2100 0 0
aux 1 1 1 900 2100 0 0
# vtxtable
vtxtable bands 5
vtxtable channels 8
vtxtable band 1 BOSCAM_A A CUSTOM 5865 5845 5825 5805 5785 5765 5745 5725
vtxtable band 2 BOSCAM_B B CUSTOM 5733 5752 5771 5790 5809 5828 5847 5866
vtxtable band 3 BOSCAM_E E CUSTOM 5705 5685 5665 0 5885 5905 0 0
vtxtable band 4 FATSHARK F CUSTOM 5740 5760 5780 5800 5820 5840 5860 5880
vtxtable band 5 RACEBAND R CUSTOM 5658 5695 5732 5769 5806 5843 5880 5917
vtxtable powerlevels 4
vtxtable powervalues 25 100 400 800
vtxtable powerlabels 25 100 400 800
# master
set dyn_notch_width_percent = 10
set dyn_notch_max_hz = 500
set acc_calibration = -31,16,5,1
set mag_hardware = NONE
set baro_hardware = NONE
set serialrx_provider = CRSF
set blackbox_p_ratio = 16
set vbat_max_cell_voltage = 422
set yaw_motors_reversed = ON
set small_angle = 180
set osd_warn_core_temp = OFF
set osd_rssi_pos = 2390
set osd_link_quality_pos = 310
set osd_rssi_dbm_pos = 299
set osd_tim_2_pos = 2453
set osd_flymode_pos = 2413
set osd_vtx_channel_pos = 2421
set osd_current_pos = 2400
set osd_mah_drawn_pos = 2432
set osd_craft_name_pos = 2442
set osd_gps_speed_pos = 342
set osd_gps_sats_pos = 310
set osd_home_dir_pos = 302
set osd_home_dist_pos = 430
set osd_altitude_pos = 341
set osd_warnings_pos = 14666
set osd_avg_cell_voltage_pos = 2369
set osd_disarmed_pos = 2336
set debug_mode = GYRO_SCALED
set vtx_band = 5
set vtx_channel = 3
set vtx_power = 1
set vtx_freq = 5732
set gyro_1_sensor_align = CW0
set gyro_1_align_yaw = 0
set name = Nazgul5 V2
profile 0
# profile 0
set dyn_lpf_dterm_min_hz = 91
set dyn_lpf_dterm_max_hz = 221
set dterm_lowpass2_hz = 195
set yaw_lowpass_hz = 70
set p_pitch = 55
set d_pitch = 41
set f_pitch = 124
set p_roll = 50
set d_roll = 38
set f_roll = 117
set p_yaw = 54
set f_yaw = 117
profile 1
profile 2
# restore original profile selection
profile 0
rateprofile 0
# rateprofile 0
set rates_type = ACTUAL
set roll_rc_rate = 19
set pitch_rc_rate = 19
set yaw_rc_rate = 19
set roll_expo = 60
set pitch_expo = 60
set yaw_expo = 60
set roll_srate = 90
set pitch_srate = 90
set yaw_srate = 90
# restore original rateprofile selection
rateprofile 0
# save configuration
save